Control System Design For Electrical Stimulation In Upper Limb Rehabilitation

Article A Neuromuscular Electrical Stimulation Nmes And Robot Hybrid System For Multi Joint Coordinated Upper Limb Rehabilitation After Stroke Full Text Neuromuscular Rehabilitation Stimulation

Web Site Restorative Therapies Xcite Fes System Receives Ce Mark Rehab Managment Fes Therapy System
Pdf Rehabilitation With Functional Electrical Stimulation In Stroke Patients

Article The Effect Of An Upper Limb Rehabilitation Robot On Hemispatial Neglect In Stroke Patients Full Text Robot Investigations

Neuromuscular Electrical Stimulation For Quads Neuromuscular Stimulation Quad Muscles

Article Automated Functional Electrical Stimulation Training System For Upper Limb Function Recovery In Poststroke Patients Full Text In 2020 Stimulation Intervention Show Control Theory
The purpose of our study is to present newly developed control strategies for an upper limb.
Control system design for electrical stimulation in upper limb rehabilitation.
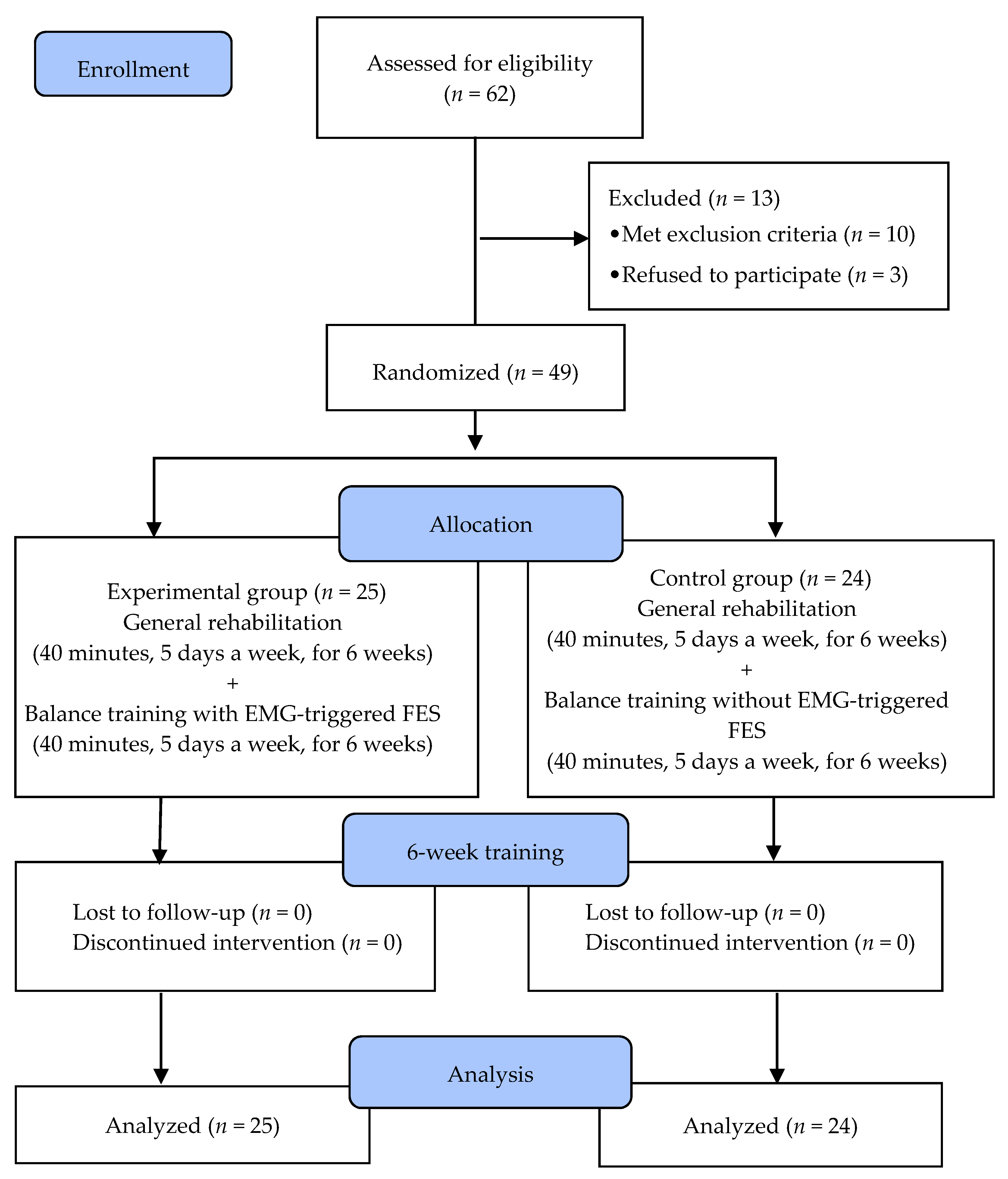
Brain Sciences Free Full Text Balance Training With Electromyogram Triggered Functional Electrical Stimulation In The Rehabilitation Of Stroke Patients Html
Pdf Neuromuscular Electrical Stimulation For Skeletal Muscle Function

Electrode Placement Guidelines Tens Electrode Chart Medi Stim Inc Tens Electrodes Tens Electrode Placement Tens Unit Placement

Electrode Placement Chart Tens Electrode Placement Tens Electrodes Tens Unit Placement

Article An Exploratory Investigation On The Use Of Closed Loop Electrical Stimulation To Assist Individuals With Stroke To Perform Fine Movements With Their H Stimulation Central Nervous System Investigations

Electrical Stimulation Also Referred To As E Stim Nmes Or Fes Can Be An Effective Tool In Reducing Stroke Rehabilitation Tens Unit Placement Stroke Therapy

Article Sefre Semi Exoskeleton Rehabilitation System Full Text Pdf Texts Pdf Paper
Pdf Development Of A Circuit For Functional Electrical Stimulation

Pdf Functional Electrical Stimulation Fes The Science Is Strong The Clinical Practice Not Yet A Review Of Evidence
Pdf Effectiveness Of Electrical Stimulation Therapy In Improving Arm Function After Stroke A Systematic Review And A Meta Analysis Of Randomised Controlled Trials

Ava Neuro Rehabilitation Centre Difference Between A Brain Injury And Head Injury Brain Injury Injury Rehabilitation Head Injury

Neuromuscular Electrical Stimulation Applications Sciencedirect

Pin By Nana On Physical Therapy Physical Therapy Student Physical Therapy School Physical Therapy Assistant

Ems Pad Placement Charts Tens Unit Placement Tens Unit Therapy Tens Unit Muscle

The Basic Goal Is To Improve Toe Clearance During Swing And Provide Stability During Stance But New Orthotic Techn Foot Drop Foot Drop Exercises Foot Exercises

Brain Computer Interfaces For Post Stroke Motor Rehabilitation A Meta Analysis Biorxiv
Pdf Neuromuscular Electrical Stimulation Assisted Grasp Training And Restoration Of Function In The Tetraplegic Hand A Case Series
Pdf Electrical Stimulation In Cerebral Palsy A Review Of Effects On Strength And Motor Function
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcqzwiak0hkkz9ktb6n13jmfblrhzwzxu5zsg2r1dk4favaqtmlj Usqp Cau

Pin On Ocupational Therapy
Pdf Clinical Use Of Neuromuscular Electrical Stimulation For Children With Cerebral Palsy Part 1 Lower Extremity

Pdf Functional Electrical Stimulation On Improving Foot Drop Gait In Poststroke Rehabilitation A Review Of Its Technology And Clinical Efficacy
Pdf Muscle Motor Point Identification Is Essential For Optimizing Neuromuscular Electrical Stimulation Use

Functional Electrical Stimulation Fes Helen Hayes Hospital
Source : pinterest.com
